This part of my research involves finding novel applications for computational mechanics and structural optimization. I aim to determine the engineering problems/applications involving complex geometries and/or physical interactions, build the necessary models, and perform the simulations that replicate real-life conditions. Such computational simulations facilitate:
- Understanding the mechanisms behind scientific phenomena involving complex physical interactions
- Designing structures and systems whose behavior cannot be expressed by simple analytical means
- Reducing the need for experimentation to lessen the expenditure of time and finances
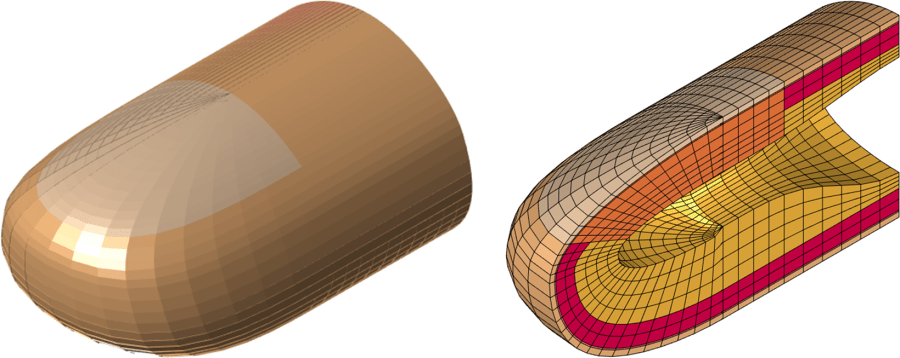
High-fidelity Human Fingertip Models
The sensation of touch originates from the skin deformation, which in turn stimulates the mechanoreceptors that send neural signals to the brain. I am developing detailed computational models for investigating the deformation mechanics of the fingertip, which is one of the most sensitive areas of the human body. I aim to build simulation tools that will enable a deeper understanding of the physical phenomena occurring within the soft tissue and skin-surface interface. Such numerical means can also be used for circumventing a portion of costly experimental procedures in the design of intelligent systems to deliver various realistic haptic experiences.
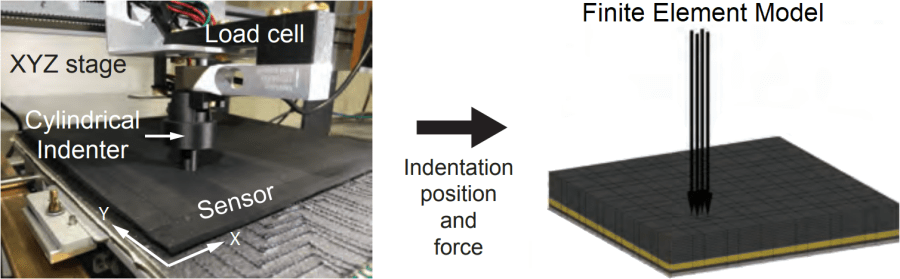
Computational Models for Calibrating Sensors via Sim-to-real Transfer Learning
Deep neural networks can also be trained with the simulated data! In this collaborative work, we use sim-to-real transfer learning for calibrating a soft tactile sensor based on electrical resistance tomography (ERT). Calibration of such sensors is challenging because the pressure reconstruction is an ill-posed inverse problem. To address this challenge, we develop a multiphysics model and optimize its parameters to minimize the gap between the simulations and reality. We use our multiphysics model to generate a large amount of data, which is then utilized for training the deep neural networks that map the measured voltages to the applied pressures.
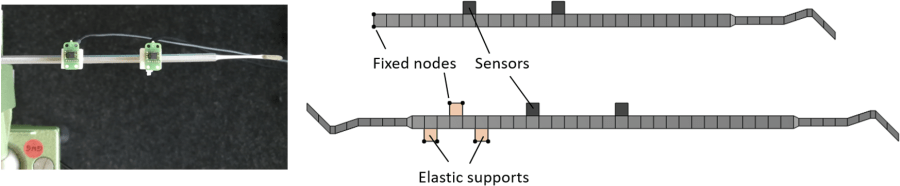
Simulation-driven Optimal Sensor Placement
Handheld tools experience large, rich, perceivable vibrations when used by a medical professional to care for a patient. Sensors can be placed on such tools for capturing clinically relevant vibrotactile cues. In this study, we seek to optimize the location of the three-axis accelerometer placed on a neurosurgical spatula tool, with the aim of maximizing its vibration-sensing capability in the frequency range relevant to touch (up to 1000 Hz). We characterize the dynamic properties of the chosen tool by utilizing finite element analysis (FEA) in conjunction with physical experiments. Then, we use a simulation-driven optimization approach to determine the sensor locations maximizing the sensing competence in the frequency range of interest.